Het algoritme voor robots is ontwikkeld door Amerikaanse en Franse wetenschappers, die hun bevindingen in Nature publiceren.
Robots kunnen dankzij het algoritme beschadigingen aan zichzelf opmerken, en analyseren hoe ze dat kunnen oplossen. De wetenschappers tonen dat aan de hand van een zespotige robot, met één beschadigde poot.

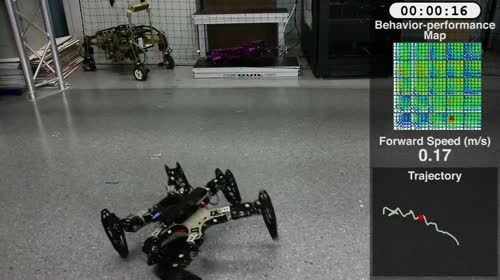
De robot merkt op dat de poot beschadigd is, en dat lopen daardoor moeizaam gaat. Er wordt dan overgeschakeld naar een modus waarbij de robot snel allerlei alternatieve manieren van voortbewegen uitprobeert.
Door het algoritme hoeft de robot maar een paar manieren te testen om er snel achter te komen wat de beste manier is. In zo’n twee minuten kan de testrobot volgens de wetenschappers vorderen van beschadigd tot weer volledig bewegend.
Onderhoudsvrij
Met het algoritme willen de wetenschappers een veelvoorkomend probleem bij robots oplossen. Wanneer huidige robots beschadigd raken, wordt dat vaak genegeerd.
De robot blijft dan bewegen alsof hij nog volledig functioneel is, maar loopt door een beschadigd onderdeel bijvoorbeeld met een afwijking naar links. Het algoritme van de wetenschappers detecteert dat verschil tussen programmering en praktijk.
Het algoritme moet toekomstige robots meer onderhoudsvrij maken, wat ze zowel beter geschikt maakt voor consumenten als onder meer reddingswerkers.